See on kasutaja 0xATA liivakast. Kasutaja liivakast on kasutajalehekülje alamleht. Siin kasutaja katsetab või valmistab ette loodavaid artikleid. See ei ole entsüklopeediaartikkel. Enda liivakasti loomiseks klõpsa siia.
Mehaaniline arvuti on arvuti, mis kasutab elektrooniliste komponentide (nt transistor) asemel mehaanilisi komponente (nt kangkaalud, hammasrattad). Mehaaniliste arvutite hulka võib lugeda näiteks arvutuslükatid, mehaanilised kalkulaatorid ja Teise maailmasõja ajal levinud pommisihikud ja tulejuhtimisseadmed.
Mehaanilised arvutid võivad olla nii analoogseadmed kui ka digitaalsed. Esimesel juhul kasutatakse arvutis mehhanisme, kus informatsiooni edastamine käib ühtlaste pindade või vedrudega, nagu näiteks arvutuslükatites. Digitaalsetes mehaanilistes arvutites kasutatakse komponente, mis saavad omada diskreetseid väärtuseid või asendeid, näiteks hammasrattaid. Erinevalt elektroonilistest arvutitest ei ole mehaanilistes arvutites üldiselt levinud kahendsüsteemi kasutamine, vaid tihti rakendatakse suurema baasiga arvusüsteeme, sest siis on võimalik vähendada komponentide arvu seadmes. Näiteks Johann Helfrich Mülleri poolt 1784. aastal loodud arvutusseadmes oli võimalik numbriplaatide vahetamisega muuta kasutatava arvusüsteemi baasi kahest kaheteistkümneni[1].
Laiemas mõistes on paljusid süsteeme võimalik vaadelda mehaanilise arvutina, näiteks kärbsepüünist või Origami mudelit. Sellisel juhul on need süsteemid võimelised endas mingil kujul mehaaniliselt infot talletama, näiteks Origami mudeli asendina, ja seda peab olema ka võimalik töödelda ja edastada. Sellised süsteemid erinevad oluliselt tavaliselt ettekujutatud arvutist ning ka Von Neumanni arhitektuurist.[2]
1960 ja 1970ndatel tõrjusid elektroonilised arvutid mehaanilised arvutid turult välja. Pöördepunktiks võib lugeda hetke kui elektroonilised seadmed läksid diskreetsetelt transistoritelt üle integraalkiipidele, mille tulemusena nende hinnad odavnesid ja mõõtmed kahanesid kordades.[3] Samuti on mehaaniliste arvutite puhul tihti probleemiks nende töötamisel tekkiv müra ja piirangud seoses mehaaniliste komponentide tootmise täpsusega. Näiteks Babbage'i Analüütilise mootori ehitamine oleks selle disainimise ajal (19. sajandi keskel) olnud võimatu, sest nii täpsete komponentide valmistamiseks puudusid nii tehnoloogiad kui ka seadmed[4].
Leibnizi ratas (ingliseLeibniz wheel või stepped drum) on aastal 1694. aastal Gottfried Leibnizi poolt välja töötatud silinder, millel kumeral küljel on eri pikkusega hammasratta hambad (vt illustratsioon paremal). Silindrit mööda oma pöörlemistelge liigutades on võimalik muuta, mitut hammast järgnev hammasratas haarab ja niiviisi on võimalik esitada erinevaid arve. Hammasrataste arvust silindrit sõltub kasutatava arvusüsteemi baas. Selle süsteemi peamiseks probleemiks oli suur suurus, mistõttu arendati välja alternatiivseid variante. Iroonilisel kombel kasutavad Leibnizi ratta modifikatsiooni näiteks Curta kalkulaatorid, mis on tuntud oma väiksuse poolest.[5][1]
Nõeltega ratas (inglisepinwheel) on sisse ja välja liigutavate hammastega hammasratas. Selle tööpõhimõte on sarnane Leibnizi rattale: ratast pöörates antakse infot järgnevale hammasrattale edasi läbi hammaste arvu. Erinevuseks on see, et antud juhul kasutatakse numbri muutmiseks mitte silindri külgsuunalist liigutamist, vaid hammaste silindri sisse liigutamist. See aitab olulisel määral kokku hoida ruumi.[5][1]
Loendurratas (inglisecounter wheel) on hammasratas, millel on ümber oma telje keereldes diskreetne arv asendeid. Mehaanilises digitaalseadmes on probleemiks, et pöörlevatel mehhanismidel ei ole diskreetseid asendeid. See on saavutatav kui hammasrattale lisada vedruga vastu hammasratast suruv mügarik. Vedru surub mügarikku vastu hammasratast, mistõttu on energeetiliselt eelistatud olukorrad, kus mügarik asub kahe hamba vahel. Selle tõttu ei pääse hammasratas ise vabalt liikuma (näiteks gravitatsiooni mõjul) ja seadmes toimuva liikumise mõjul "hüppab" ühest diskreetsest asendist teise.[5][1]
Nõeltega ratas, kus hambaid liigutab sisse või välja seespool asuv teine ketasÜlekanne (inglisecarry) on kahe arvu liitmisel tekkiv number, mis kantakse madalama kaaluga numbrite tulbast üle suurima kaaluga numbrite tulpa. Näiteks tehtes 8+9=17 on ülekandeks 1, mis liigub üheliste tulbast kümneliste tulpa. Ülekandeid tuleb arvutades arvesse võtta liikudes madalama kaaluga väärtuste poolt kõrgema kaaluga väärtuste suunas, sest iga ülekanne võib mõjutada järgnevat tulemust. Mehaaniliste arvutite puhul on see probleemiks, sest üldjuhul toimub arvutamine kõigi kaaluga numbrite puhul korraga. Lahenduseks on lisada igat numbrit esindavale loendurmehhanismile eraldi hammasratas ühe hambaga. See hammas liigutas ülekandemehhanismi siis kui numbris toimus üleminek üheksalt nullile või vastupidi (eeldusel, et kasutati kümnendsüsteemis hammasrattaid). Selle tulemusena ülekandemehhanismis vastav hoob lukustus aktiivsesse olekusse. Kui liitmise üldmehhanism oli oma töö lõpetanud, oli võimalik aktiivsete hoobade järgi kõik ülekanded väiksemast suuremani ära arvutada, misjärel hoovad liigutati tagasi passiivsesse olekusse.[5][1]
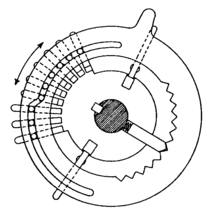
Kettaga integraator (ingliseball-and-disk integrator) on paljudes diferentsiaalanalüsaatorites kasutusel olnud mehanism määratud integraalide leidmiseks. See mehhanism kasutab pöörlevat alusketast, mille peal asub teine ketas või kera. Kettal asuv kera/ketas pöörleb hõõrdejõu mõjul suurema aluskettaga kaasa ning selle asukohta saab alusketta peal muuta. Kuna alusketta joonkiirus on keskpunktist kaugenedes väiksem, siis pöörleb ka kera/ketas seal väiksema kiirusega. Tegemist on analoogsüsteemiga, sest kera/ketta asukohta aluskettal saab muuta kogu raadiuse ulatuses jooksvalt ning see ei ole määratud kindlate väärtustega. Integreerimise moodustab kera/ketta pöörete arvu sõltuvus alusketta pöörlemiskiirusest ja kaugusest keskpunktist. Näiteks on võimalik panna kera/ketta kaugus alusketta keskpunktist sõltuma mingist ajalisest funktsioonist. Keta/ketta pöörete arv mingi kindla aja jooksul on siis võrdeline vastava määratud integraaliga. Tihti oli tarvis kasutada mitut integraatorit jadamisi, aga kuna iga integraatori väljundi jõumoment sõltus hõõrdumise tõttu tekkinud liikumisest, siis ei suutnud väljund järgnevaid integraatoreid ringi ajada. Selle tõttu ei olnud kettaga integraatorid enne jõumomendi võimendi kasutuselevõttu laialt levinud. Neid kasutati laialdaselt sõjatehnikas pommi- ja suurtükisihikutes ning ka oma aja kohta keerulistes diferentsiaalanalüsaatorites, mis võimaldasid integreerimise teel numbriliselt lahendada diferentsiaalvõrrandeid. Samuti leidub selliseid seadmeid, mida kasutatakse paberil joonestamiseks, kus jälitades mingi kontuuri piirjoont on võimalik leida selle kontuuri pindala. Tööpõhimõtet demonstreeriv video.[6][1]
Nihutatav skaala (inglise scale) on sirge või ringikujuline lapik objekt, millele äärele on märgitud arvuline skaala. Peamiselt kasutatakse neid arvutuslükatites. Samuti on skaala taustale või kõrvalasuvale skaalale märgitud mingi arvuline skaala. Nihutades või pöörates neid omavahel on võimalik sooritada korrutamist, jagamist, astendamist ja logaritmimist. Samuti kasutatakse neid ka trigonomeetriliste funktsioonide jaoks. Liitmist ja lahutamist üldjuhul nendega sooritada pole võimalik, sest neid on teistel meetoditel (kirjalikult) üsna lihtsalt sooritada.
Mehaaniline integraator Kelvini harmoonilisest analüsaatorist. Seadmel on lisaks veel üks silinder, et edasi anda ketta liikumist ainult ühes suunas.
Üks osa Charles Babbage'i poolt 19. sajandil disainitud ja osaliselt valmis ehitatud Analüütilisest mootorist. Seda loetakse tihti esimeseks modernseks digitaalseks arvutiks.
Esimeseks modernseks üldise otstarbega arvutiks loetakse Analüütilist mootorit, mis oli Charles Babbage'i poolt 19. sajandil disainitud mehaaniline digitaalarvuti. Selle puhul on tegemist edasiarendusega Babbage'i diferentsiaalmootorist, mis oli mõeldud polünoomide väärtuste arvutamiseks. Analüütilisel mootoril oli sisseehitatud mälu ja aritmeetika-loogikaplokk ning tugi loogikatehete ja tsüklite kasutamiseks. Seda oli võimalik programmeerida kasutades perfokaarte.[4][7]
ZAP-23 on õhutõrjesihik, mida leidub ka Eesti kaitseväes kasutusel olevat õhutõrjekahuritel ZU-23-2. Antud seade arvutab operaatori poolt sisestatud andmete põhjal sihikule parandi, et laskja ei peaks arvestama laskemoona lennuajaga.[8]
NASAAREE (ingliseAutomaton Rover for Extreme Environments) sondil planeeritakse kasutada mehaanilist arvutit, sest see peaks Veenuse tingimustes paremini vastu kui elektrooniliste komponentidega seade.[9]
Curta mehaanilisi kalkulaatoreid loeti parimateks kaasaskantavateks kalkulaatoriteks kuni elektrooniliste kalkulaatorite levikuni 1970ndatel aastatel.[10]
E6B on lennunduses kasutatav arvutuslükati. See võimaldab ühe käega arvutada õhusõiduki juhtimiseks vajalikke parameetreid, näiteks kõrvalekaldumis oma lennutrajektoorist tuule tõttu. Tegemist on ainsa mehaanilise analoogarvutiga, mis on tänapäeval laialdaselt kasutuses. Emulaator
Lord Kelvini poolt 1878. aastal loodud harmooniline analüsaator võimaldas analüüsida ja ennustada muutusi õhutemperatuuris ja -rõhus. Seade kasutas kaheksat kettaga integraatorit.[11]
Antikythera mehhanism on antiikajast pärit mehaaniline arvutusseade astronoomiliste arvutuste tegemiseks.[12]Lennunduses kasutusel olev arvutuslükati E6B
↑ 1,01,11,21,31,41,5Herbert Bruderer (2022). Milestones in Analog and Digital Computing, Third Edition. Rorschach, Šveits: Springer.
↑Hiromi Yasuda; Philip R. Buskohl; Andrew Gillman; Todd D. Murphey; Susan Stepney; Richard A. Vaia; Jordan R. Rane (06.10.2021). "Mechanical Computing". Nature. Vaadatud 01.05.2022.











 Mehaaniline integraator Kelvini harmoonilisest analüsaatorist. Seadmel on lisaks veel üks silinder, et edasi anda ketta liikumist ainult ühes suunas.
Mehaaniline integraator Kelvini harmoonilisest analüsaatorist. Seadmel on lisaks veel üks silinder, et edasi anda ketta liikumist ainult ühes suunas. Arvutuslükati koos nihutatava skaalaga
Arvutuslükati koos nihutatava skaalaga Ümara kujuga arvutuslükati
Ümara kujuga arvutuslükati


.jpg)


